The CAN bus’s core technology consists of two components: hardware and software. Microcontroller, CAN controller, and CAN transceiver are components of the hardware. Node
control software and CAN bus network application layer protocol are included in the package.
An essential piece of CAN bus hardware is the microcontroller. We will go into great detail about
the many kinds of microcontrollers in this article.
Microcontroller Definition
Microcontroller Unit, sometimes known as MCU for short, and Microcontroller Unit or
Microcontroller in Chinese is the two name for MCU. The microcontroller is sometimes known
as a single-chip microcomputer because it combines the arithmetic logic unit (ALU), memory,
timer/calculator, and numerous I/O circuits into one chip to provide a nearly fully functional
the computing system (Single-Chip Microcomputer).
The microcontroller hardware and the hardware circuits of the peripheral devices are closely
employed in conjunction with the program stored in the microcontroller memory. Unlike PC
software, it is distinct. Firmware is a term used to describe the microcontroller’s software
(Firmware). In general, a microprocessor is defined as having a single integrated circuit for the
CPU and a microcontroller are defined as having a single integrated circuit for the CPU, ROM,
RAM, VO, timer, etc. The microcontroller can only execute a few relatively straightforward and
single-purpose functions, such as control and logic, as compared to the CPU because it lacks the
memory management unit (MMU) and more powerful computational capacity. It is utilized in a
variety of industries, including those that control machinery, process sensor signals, and use
electric tools and some home and office gadgets.
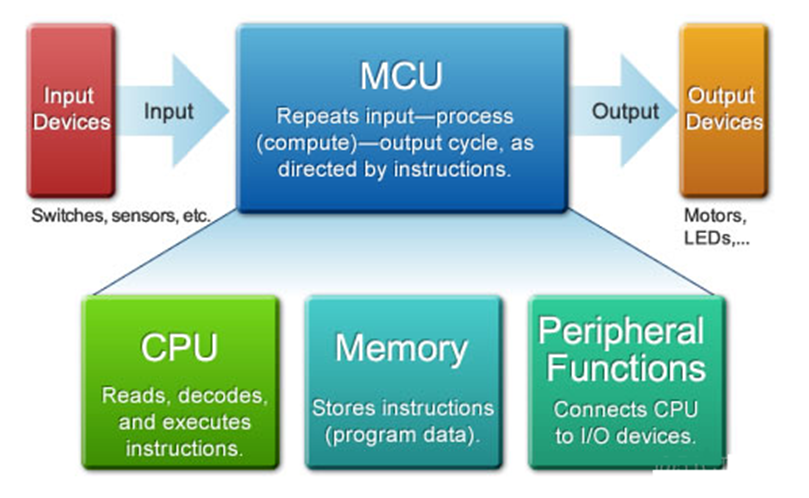
Composition of Microcontroller
A microcontroller consists of a central processing unit, memory, and input/output:
1. CPU:
The central processing unit is the core component of the MCU, including two main parts of the arithmetic unit and the controller.
Calculator
The arithmetic unit is made up of registers, accumulators, and arithmetic and logical units, or
ALUs for short. The incoming data is subjected to arithmetic or logical operations by the ALU.
Two 8-bit data, originating from the data register and the accumulator, respectively, are the
input sources. The ALU is capable of performing operations like addition, subtraction, AND, or, and comparison of two pieces of data before accumulating the outcome.
The calculator has two functions:
- Carry out a number of arithmetic procedures.
- Execute several logical operations and tests, such as zero-value testing and value comparison.
Arithmetic and logic operations both result in decisions, and all actions carried out by the
arithmetic units are controlled by control signals sent by the controller.
Controller
The program counter, instruction register, instruction decoder, timing generator, operation
controller, etc. make up the controller. The “decision-making mechanism” is what sends out
orders, i.e., coordinates and controls how the entire microcomputer system works. Its primary
purposes are:
- Retrieve an instruction from memory while indicating where the subsequent instruction is located.
- To make it easier to carry out the prescribed tasks, decode and test the instructions, and then generate the necessary operation control signals.
- Direct and regulate how data moves between the CPU, memory, and input and output devices.
The microprocessor links to the internal bus, which connects to the ALU, counters, registers, and
control components, and to the external bus, which connects to the external memory and input
and output interface circuits. The system bus, which consists of the data bus DB, address bus AB,
and control bus CB, is another name for the external bus. realizing the connection with
numerous external devices through the input and output interface circuit.
2. Memory
Memory can be divided into two categories: data memory and program memory.
The data memory is used to save data, and the program memory is used to store programs and parameters.
3. Input/Output- link or drive different devices
Serial communication port – data exchange between MCU and different peripherals, such as
UART, SPI, 12C, etc.
Microcontroller Classification
Microcontrollers can be categorized into four groups based on the amount of digits: 4-bit, 8-bit,
16-bit, and 32-bit. 32 bits make up 55% of practical applications, followed by 8 bits (43%), 4 bits
(2%), and 16 bits (1%).
The most popular microcontrollers in use today are 32-bit and 8-bit, as can be shown.
The variation in the number of digits cannot accurately reflect the microprocessor’s quality. It is neither true that the microprocessor with more digits is superior, nor is it true that the microprocessor with less digits is inferior.
8-bit MCUs can be used for a variety of applications and provide simple programming, energy
efficiency, and tiny package sizes (some as few as six pins). However, the implementation of
network and communication operations does not typically utilize these microcontrollers.
16-bit or 32-bit software stacks are the most widely used network protocols. For some 8-bit
devices, communication peripherals are available, although 16- and 32-bit MCUs are frequently more effective options. However, 8-bit MCUs are frequently employed in several control, sensor,
and interfacing applications.
Microcontrollers can be categorized into two groups based on their architecture: RISC (Reduced
Instruction Set Computers) and CISC (Complex Instruction Set Computers, complex instruction
set computers).
A microprocessor known as RISC carries out fewer different kinds of computer instructions. It
was developed in the 1980s from the RISC-based MIPS host. RISC processors are the general
name for the microprocessors used in RISC devices. This enables it to carry out operations more
quickly (more million instructions per second, or MIPS). A bigger computer instruction set makes
the microprocessor more complex and slower to conduct tasks because computers need more
transistors and circuit components to execute each type of instruction.
A wide variety of microinstructions in CISC make it easier to write programs that can be executed
by the processor. Assembly language is used in instructions. The work of programmers is greatly
reduced as some frequently utilized functions that were first realized by the software are now
realized by hardware instruction systems. To increase the computer’s execution speed, some
low-level activities or calculations are done concurrently throughout each instruction cycle. This
system is known as a complex instruction system.
Summarize
Building a cheap, trouble-free automotive system that can function even in the case of a breakdown is one of the major problems that today’s automotive electronics engineers must
overcome. Microcontrollers are anticipated to boost the efficiency of automotive electronic
control units as the performance of vehicles continually improves.